| |
Robot Building Strategy
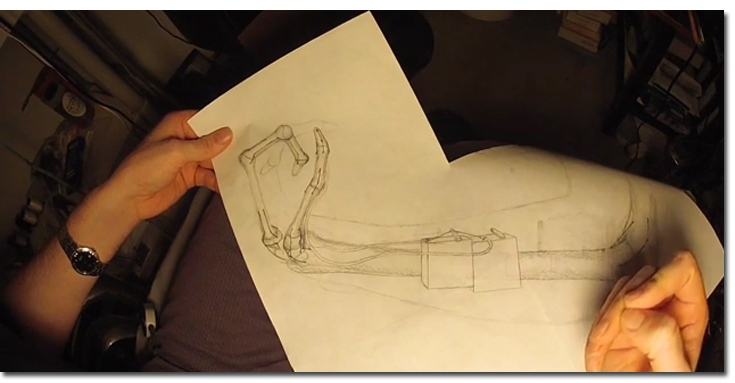
I plan to first build the left arm, implementing the motors and their attachments to thread that
will run through teflon sleeves and connect to the bones in strategic locations matching the places
that muscles attach to the bones. The servos pulling the threads will serve as the "muscle system"
doing the same pulling that muscles do. I demonstrate this functionality
here. Upon finishing the left arm and hand,
I will be making the spine and rib cage within which I will mount the main computer, batteries, artificial
lungs cooling system, and additional servomotors. I will need somewhere a huge qty of 18650 cell lithium
batteries for this robot and so the torso will need to be CRAMMED with stuff. The cooling system
will be critical to prevent overheating since all of these hot electronics will be stuffed inside
a silicone skin suit trapping in all the heat being generated. From there the robot will make his own
pelvis, legs, and head with my assistance - ideally doing it mostly all himself by way of AI.
Then last we will make the right arm. Throughout the build I will be trying to place servomotors
as efficiently as I can, however, I fully expect to move them all many times as I try to figure
out more efficient ways to cram them in - I will need SOOO many servo motors that cramming them in will
be hard. During each addition of several servo motors, I will be rigging them and testing them and
begin coding them for testing purposes to do basic movements. As the project moves forward, I will also
be creating a flexible mesh exoskeleton that will form the shape of muscles and encase the entire robot.
It will be a protective and shape defining outer structural framework upon which I will lay down the
silicone skin. The silicone skin will be painted and created with careful attention to detail so that
it looks like real human skin. I will even insert real hair into the skin. The masterful simulation
of human skin can be seen in the movie special effects industry and I will be pulling upon their techniques
for my robot so that my robot will look real. The face will be given 20-30+ mini motors to control its
facial expressions so that it can talk with moving lips and a full range of simulated emotion. I will
create an additional 3 backpacks full of extra lithium batteries that the robot can strap onto his back for
any extended operating periods. This way he can function indefinitely without running out
of batteries. He will have webcam eyes "see" and strain gauges (pressure sensors) that will enable him to "feel".
He will have accelerometers and
gyrometers for balance and walking capabilities. During the robot build and especially upon completion
of the robot will come a huge effort put into coding his advance artificial intelligence and capabilities.
The coding of his AI will take up the lions share of the project, most likely involving 30+ years of
development to give him all of the capabilities I have envisioned such as cooking, cleaning, walking, talking,
dancing, mowing the lawn, painting, etc.
|
|








